Tech Stack
ROS2
Gazebo
Linux
Fusion360
C/C++
Description
Developed a robot that can autonomously perform surgeries without human input
Robot can also perform surgical assistive tasks like equipment handling ?
- Designed components in fusion
- gathered various videos of surgeries to train the robot
- Reinforcement learning done using mujoco for precise pgysics simulation
Page Info
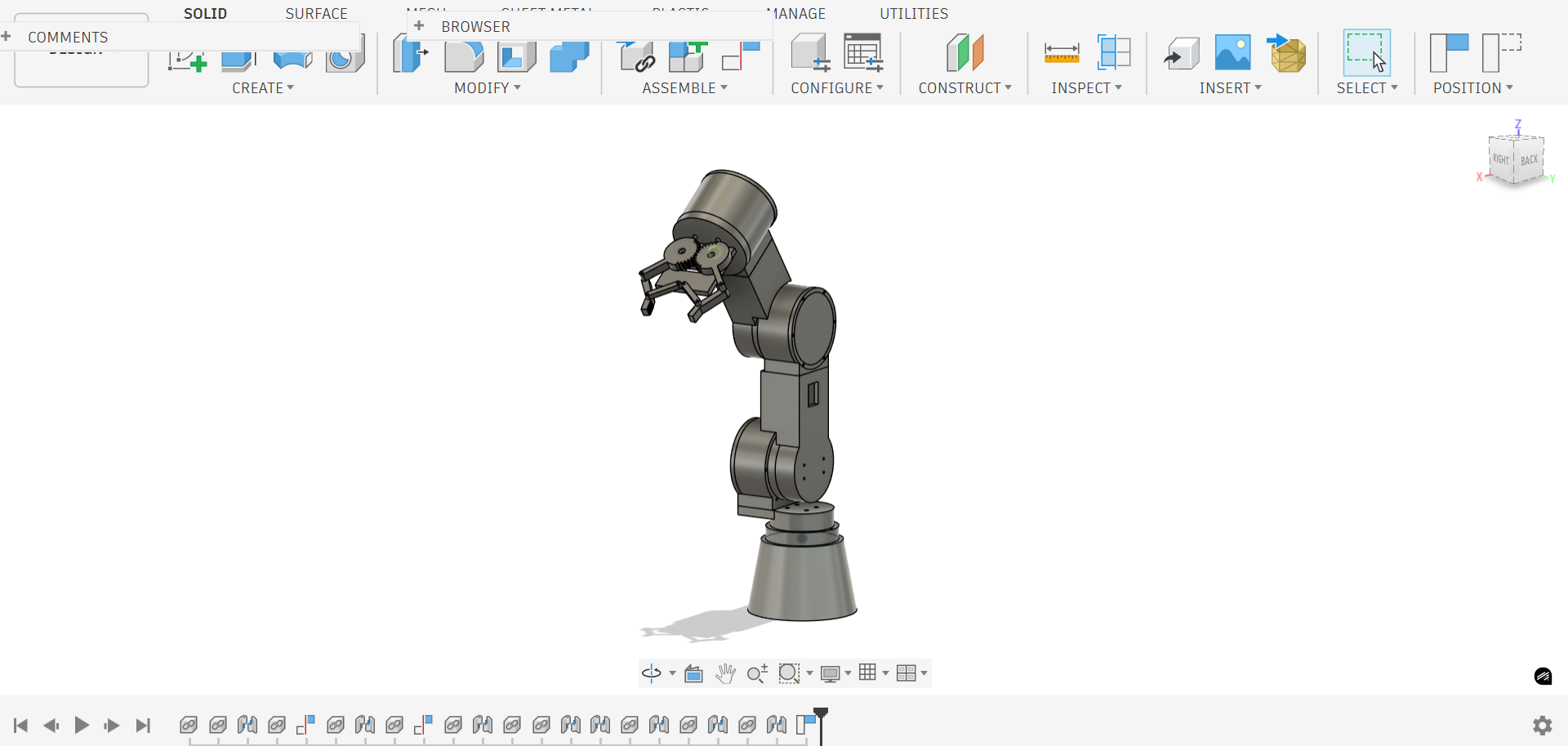
Design
Each component was designed and assembled using Fusion360
Training
Training was done in the Mujoco simulator using videos from various caesarian section surgeries